Après
la modélisation des pièces il nous a fallu définir
les liaisons entre chaque pièce dans le module d’assemblage
(assembly design) de CATIA afin de mettre en forme et de créer
le système mécanique.
Après
la modélisation des pièces il nous a fallu définir
les liaisons entre chaque pièce dans le module d’assemblage
(assembly design) de CATIA afin de mettre en forme et de créer
le système mécanique.
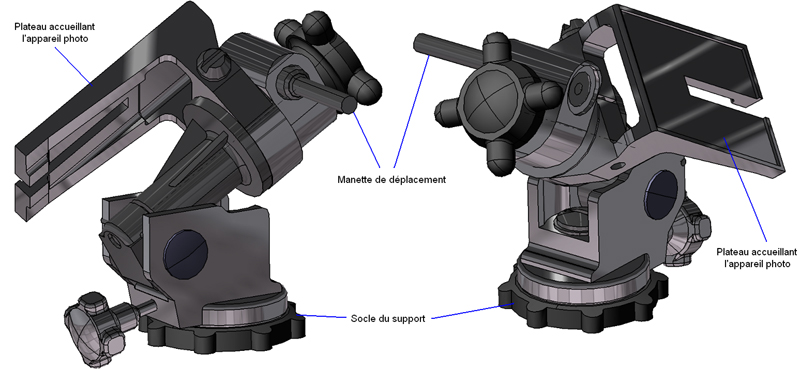
L’essentiel
de nos liaisons, comme nous l’avons vu dans la présentation
du mécanisme, sont des liaisons pivots et des contacts
surfaciques. Nous allons devoir les mettre en place pour imposer
les mouvements transmis et donc les degrés de liberté
entre chaque pièces du système. Le logiciel positionne
alors automatiquement celles-ci les unes par rapport aux autres
une fois les contraintes de liaisons définies. Nous procédons
par la mise en place de ces contraintes pièce par pièce
et construisons ainsi notre support d’appareil photo dans
l’espace.
Une
liaison pivot est définie par deux contraintes sur la
pièce : une contrainte de co-axialité entre les
axes des deux pièces et une contrainte de positionnement
entre les plans parallèles de chaque pièce. Ces
contraintes de positionnement sont représentées
dans la majeure partie sur CATIA par des contraintes de décalages
ou contacts surfaciques.
La
vue éclatée des pièces de l’assemblage
permet de bien visualiser les liaisons pivots et leurs axes.
Les assemblages suivants, montrent bien la réalité
des différentes mobilités de l’ensemble
en 3D.